 |
GestureRecognitionToolkit
Version: 0.2.0
The Gesture Recognition Toolkit (GRT) is a cross-platform, open-source, c++ machine learning library for real-time gesture recognition.
|
|
GestureRecognitionToolkit
Version: 0.2.0
The Gesture Recognition Toolkit (GRT) is a cross-platform, open-source, c++ machine learning library for real-time gesture recognition.
|
#include <DecisionTreeNode.h>
Public Member Functions | |
| DecisionTreeNode () | |
| virtual | ~DecisionTreeNode () |
| virtual bool | predict (const VectorFloat &x, VectorFloat &classLikelihoods) |
| virtual bool | computeBestSpilt (const UINT &trainingMode, const UINT &numSplittingSteps, const ClassificationData &trainingData, const Vector< UINT > &features, const Vector< UINT > &classLabels, UINT &featureIndex, Float &minError) |
| virtual bool | clear () |
| virtual bool | getModel (std::ostream &stream) const |
| virtual Node * | deepCopyNode () const |
| DecisionTreeNode * | deepCopy () const |
| UINT | getNodeSize () const |
| UINT | getNumClasses () const |
| VectorFloat | getClassProbabilities () const |
| bool | setLeafNode (const UINT nodeSize, const VectorFloat &classProbabilities) |
| bool | setNodeSize (const UINT nodeSize) |
| bool | setClassProbabilities (const VectorFloat &classProbabilities) |
 Public Member Functions inherited from Node Public Member Functions inherited from Node | |
| Node () | |
| virtual | ~Node () |
| virtual bool | predict (const VectorFloat &x) |
| virtual bool | computeFeatureWeights (VectorFloat &weights) const |
| virtual bool | computeLeafNodeWeights (MatrixFloat &weights) const |
| virtual bool | print () const |
| virtual bool | save (std::fstream &file) const |
| virtual bool | load (std::fstream &file) |
| std::string | getNodeType () const |
| UINT | getDepth () const |
| UINT | getNodeID () const |
| UINT | getPredictedNodeID () const |
| UINT | getMaxDepth () const |
| bool | getIsLeafNode () const |
| bool | getHasParent () const |
| bool | getHasLeftChild () const |
| bool | getHasRightChild () const |
| Node * | getParent () const |
| Node * | getLeftChild () const |
| Node * | getRightChild () const |
| bool | initNode (Node *parent, const UINT depth, const UINT nodeID, const bool isLeafNode=false) |
| bool | setParent (Node *parent) |
| bool | setLeftChild (Node *leftChild) |
| bool | setRightChild (Node *rightChild) |
| bool | setDepth (const UINT depth) |
| bool | setNodeID (const UINT nodeID) |
| bool | setIsLeafNode (const bool isLeafNode) |
| Node * | createNewInstance () const |
| Public Member Functions inherited from GRTBase | |
| GRTBase (void) | |
| virtual | ~GRTBase (void) |
| bool | copyGRTBaseVariables (const GRTBase *GRTBase) |
| std::string | getClassType () const |
| std::string | getLastWarningMessage () const |
| std::string | getLastErrorMessage () const |
| std::string | getLastInfoMessage () const |
| bool | setInfoLoggingEnabled (const bool loggingEnabled) |
| bool | setWarningLoggingEnabled (const bool loggingEnabled) |
| bool | setErrorLoggingEnabled (const bool loggingEnabled) |
| GRTBase * | getGRTBasePointer () |
| const GRTBase * | getGRTBasePointer () const |
Static Public Member Functions | |
| static UINT | getClassLabelIndexValue (UINT classLabel, const Vector< UINT > &classLabels) |
| Static Public Member Functions inherited from Node | |
| static Node * | createInstanceFromString (std::string const &nodeType) |
| Static Public Member Functions inherited from GRTBase | |
| static std::string | getGRTVersion (bool returnRevision=true) |
| static std::string | getGRTRevison () |
Protected Member Functions | |
| virtual bool | computeBestSpiltBestIterativeSpilt (const UINT &numSplittingSteps, const ClassificationData &trainingData, const Vector< UINT > &features, const Vector< UINT > &classLabels, UINT &featureIndex, Float &minError) |
| virtual bool | computeBestSpiltBestRandomSpilt (const UINT &numSplittingSteps, const ClassificationData &trainingData, const Vector< UINT > &features, const Vector< UINT > &classLabels, UINT &featureIndex, Float &minError) |
| virtual bool | saveParametersToFile (std::fstream &file) const |
| virtual bool | loadParametersFromFile (std::fstream &file) |
| Protected Member Functions inherited from GRTBase | |
| Float | SQR (const Float &x) const |
Protected Attributes | |
| UINT | nodeSize |
| VectorFloat | classProbabilities |
| Protected Attributes inherited from Node | |
| std::string | nodeType |
| UINT | depth |
| UINT | nodeID |
| UINT | predictedNodeID |
| bool | isLeafNode |
| Node * | parent |
| Node * | leftChild |
| Node * | rightChild |
| Protected Attributes inherited from GRTBase | |
| std::string | classType |
| DebugLog | debugLog |
| ErrorLog | errorLog |
| InfoLog | infoLog |
| TrainingLog | trainingLog |
| TestingLog | testingLog |
| WarningLog | warningLog |
Static Protected Attributes | |
| static RegisterNode< DecisionTreeNode > | registerModule |
Additional Inherited Members | |
| Public Types inherited from Node | |
| typedef std::map< std::string, Node *(*)() > | StringNodeMap |
| Static Protected Member Functions inherited from Node | |
| static StringNodeMap * | getMap () |
GRT MIT License Copyright (c) <2012> <Nicholas Gillian, Media Lab, MIT>
Permission is hereby granted, free of charge, to any person obtaining a copy of this software and associated documentation files (the "Software"), to deal in the Software without restriction, including without limitation the rights to use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of the Software, and to permit persons to whom the Software is furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
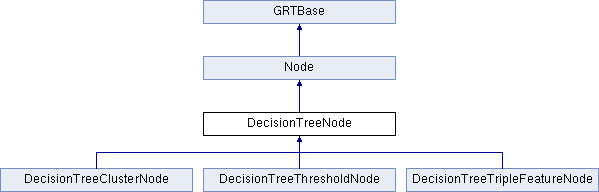
Definition at line 40 of file DecisionTreeNode.h.
| DecisionTreeNode::DecisionTreeNode | ( | ) |
Default Constructor. Sets all the pointers to NULL.
Definition at line 10 of file DecisionTreeNode.cpp.
|
virtual |
Default Destructor. Cleans up any memory.
Definition at line 18 of file DecisionTreeNode.cpp.
|
virtual |
This functions cleans up any dynamic memory assigned by the node. It will recursively clear the memory for the left and right child nodes.
Reimplemented from Node.
Reimplemented in DecisionTreeClusterNode, DecisionTreeThresholdNode, and DecisionTreeTripleFeatureNode.
Definition at line 76 of file DecisionTreeNode.cpp.
|
virtual |
This function calls the best spliting algorithm based on the current trainingMode.
This function will return true if the best spliting algorithm found a split, false otherwise.
| trainingMode | the training mode to use, this should be one of the |
| numSplittingSteps | sets the number of iterations that will be used to search for the best threshold |
| trainingData | the training data to use for the best split search |
| features | a Vector containing the indexs of the features that can be used for the search |
| classLabels | a Vector containing the class labels for the search |
| featureIndex | this will store the best feature index found during the search |
| minError | this will store the minimum error found during the search |
Definition at line 58 of file DecisionTreeNode.cpp.
| DecisionTreeNode * DecisionTreeNode::deepCopy | ( | ) | const |
This function returns a deep copy of the DecisionTreeNode and all it's children. The user is responsible for managing the dynamic data that is returned from this function as a pointer.
Definition at line 143 of file DecisionTreeNode.cpp.
|
virtual |
This function returns a deep copy of the DecisionTreeNode and all it's children. The user is responsible for managing the dynamic data that is returned from this function as a pointer.
Reimplemented from Node.
Reimplemented in DecisionTreeClusterNode, DecisionTreeThresholdNode, and DecisionTreeTripleFeatureNode.
Definition at line 112 of file DecisionTreeNode.cpp.
| VectorFloat DecisionTreeNode::getClassProbabilities | ( | ) | const |
This function returns the class probabilities Vector.
Definition at line 155 of file DecisionTreeNode.cpp.
|
virtual |
This function adds the current model to the formatted stream. This function should be overwritten by the derived class.
| stream | a reference to the stream the model will be added to |
Reimplemented from Node.
Reimplemented in DecisionTreeClusterNode, DecisionTreeThresholdNode, and DecisionTreeTripleFeatureNode.
Definition at line 87 of file DecisionTreeNode.cpp.
| UINT DecisionTreeNode::getNodeSize | ( | ) | const |
This function returns the nodeSize, this is the number of training samples that reached the node during the training phase.
Definition at line 147 of file DecisionTreeNode.cpp.
| UINT DecisionTreeNode::getNumClasses | ( | ) | const |
This function returns the number of classes in the class probabilities Vector.
Definition at line 151 of file DecisionTreeNode.cpp.
|
inlineprotectedvirtual |
This loads the Decision Tree Node parameters from a file.
| file | a reference to the file the parameters will be loaded from |
Reimplemented from Node.
Reimplemented in DecisionTreeClusterNode, DecisionTreeTripleFeatureNode, and DecisionTreeThresholdNode.
Definition at line 217 of file DecisionTreeNode.h.
|
virtual |
This function recursively predicts if the probability of the input Vector. If this node is a leaf node, then the class likelihoods are equal to the class probabilities at the leaf node. If this node is not a leaf node, then this function will recursively call the predict function on either the left or right children until a leaf node is reached.
NOTE: The threshold, featureIndex and classProbabilities should be set first BEFORE this function is called. The threshold, featureIndex and classProbabilities can be set by training the node through the DecisionTree class.
| x | the input Vector that will be used for the prediction |
| classLikelihoods | a reference to a Vector that will store the class probabilities |
Reimplemented from Node.
Definition at line 22 of file DecisionTreeNode.cpp.
|
inlineprotectedvirtual |
This saves the DecisionTreeNode custom parameters to a file. It will be called automatically by the Node base class if the save function is called.
| file | a reference to the file the parameters will be saved to |
Reimplemented from Node.
Reimplemented in DecisionTreeClusterNode, DecisionTreeTripleFeatureNode, and DecisionTreeThresholdNode.
Definition at line 188 of file DecisionTreeNode.h.
| bool DecisionTreeNode::setClassProbabilities | ( | const VectorFloat & | classProbabilities | ) |
This function sets the Decision Tree Node class probabilities.
| classProbabilities | the Vector of class probabilities at this node |
Definition at line 171 of file DecisionTreeNode.cpp.
| bool DecisionTreeNode::setLeafNode | ( | const UINT | nodeSize, |
| const VectorFloat & | classProbabilities | ||
| ) |
This function sets the Decision Tree Node as a leaf node.
| nodeSize | sets the node size, this is the number of training samples at that node |
| classProbabilities | the Vector of class probabilities at this node |
Definition at line 159 of file DecisionTreeNode.cpp.
| bool DecisionTreeNode::setNodeSize | ( | const UINT | nodeSize | ) |
This function sets the Decision Tree Node nodeSize.
| nodeSize | sets the node size, this is the number of training samples at that node |
Definition at line 166 of file DecisionTreeNode.cpp.
 1.8.11
1.8.11 
